如若转载,请注明出处:http://www.yunxiao101.com/product/181.html
800 iemis 完善的企业管理信息服务及系统解决方案
游戏加盟代理培训_游戏模式代理加盟
代理游戏微信
在线发行│互联网发行平台
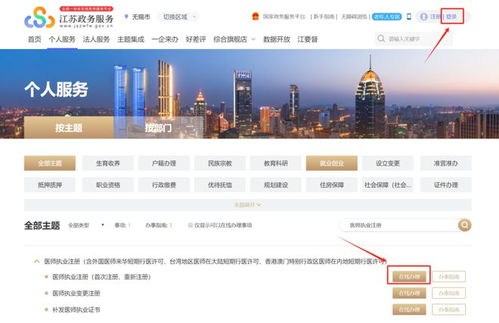
今年起这项注册工作 全程网办
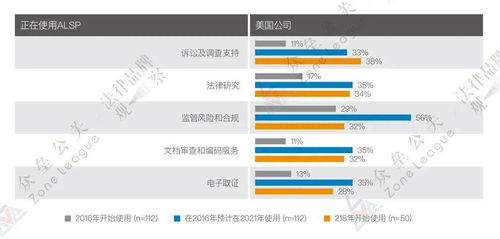
替代性法律服务正在向高净值业务领域移动
一只“马桶”的移动信息化之路_科技_网
手游公司
佛山石油化工资质延期信誉保障 资质服务中介 政策变化
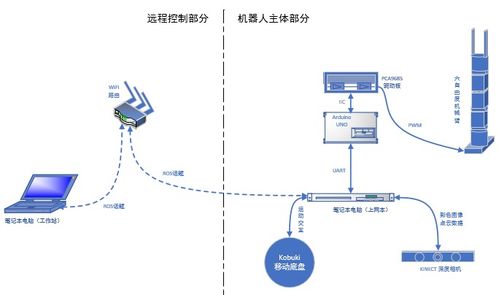
基于rgb d 深度视觉 的具有机械臂抓取功能的自主规划移动服务机器人的设计与实现 一 准备工作